|
|

|

|
| e-Pub |
Section: New Results
Human modeling for situation understanding
Situation understanding and risk assessment for intelligent vehicles
Participants : Dizan Vasquez, Stéphanie Lefèvre, Suryansh Kumar, Yufeng Yu.
The work on this period has been aimed at establishing a solid theoretical and technological base for our research on situation understanding. A step in this direction was the elaboration of an in-depth survey of the current state of the art on the field, prepared together with the university of Berkeley [12] . In the framework of the same collaboration, we have been working on the introduction of human models in current Advanced Driving Assistance Systems (ADAS). This has led to the development of a novel Lane Keeping Assistance System (LKAS) which is able to learn the driver's driving patterns and use them to predict lane departures as well as to generate controls that mimic the driver's style and are, thus, deemed to be more acceptable. The approach has been evaluated against commercial LKAS using real field data, and the results show that the proposed approach is both more efficient and less intrusive than current approaches. This is, for the best of our knowledge the first use of human models withing LKAS and these results illustrate the strong potential that these models may have in ADAS.
Concerning autonomous navigation, we have focused on human-like motion planning for motion prediction. The main hypothesis is that people behave like planners whose motion optimizes some an unknown cost function. Under this assumption, the main challenge becomes to model that cost function and to learn its parameters from demonstrated behavior. This is called, depending on the community, either Inverse Reinforcement Learning (IRL) or Inverse Optimal Control (IOC). Now, a problem with IRL is that it requires examples of both desirable and undesirable behavior, which are difficult to obtain with a real platform. Additionally, there is no consistent benchmarking methodology to evaluate different approaches. This has motivated our work in a benchmark comprised of: (a) an evaluation methodology; (b) a simulated experimental platform (Fig. 13 ) based on the Torcs simulator ; and (c) real data gathered with our instrumented Lexus vehicle. The first prototype of this benchmark, developed together with students from Beijing University and IIIT Hyderabad, has been presented this year in a vehicular technologies conference .
|


Socially compliant robot navigation in human environments
Participant : Dizan Vasquez.
The models we have applied to intelligent vehicles are also adapted in general to situations where mobile robots share their environment with humans. This has lead us to apply this techniques to the assistive robotics fields, given that it is one of e-motion's major applications axes. Our first effort in this sense has been to design and develop a robust experimental platform with baseline modules for motion planning, perception and social awareness .
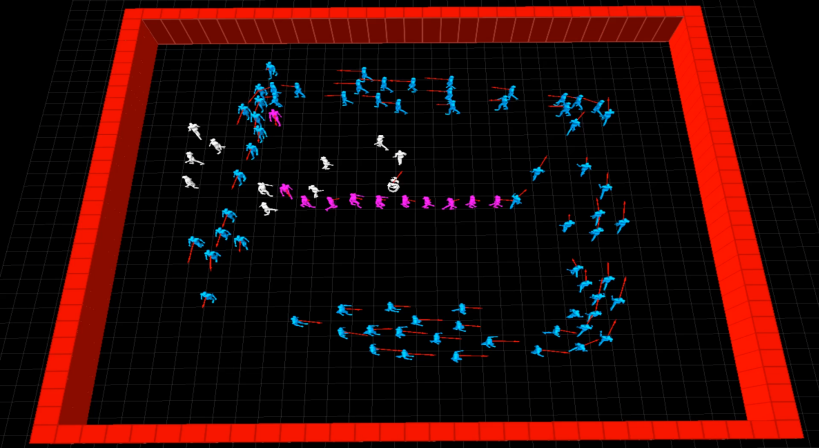
In parallel we started working, in collaboration with the University of Freiburg, on a benchmarking platform for social compliant motion planning, close in spirit to the one proposed for intelligent vehicles. The platform (Fig. 14 ) is described in , it includes several motion planning and feature extraction algorithms as well as a pedestrian simulator based on Helbing's social force model .